■ 赤外線リモコンの種類
> 用途: TV、エアコン など
> 機能: (1)送信、(2)受信 の2つで構成されています。
■ 送信側の概要:
>リモコン(送信機)の写真
 |
| (注) 赤外線LEDにオシロスコープのプローブを付けています。緑: 正極、黒:GND です。 |
>送信機のブロック図
- LED: 赤外線で信号を送る部分です。モースル信号のようなデータを送っている。
- スイッチ:21個ついている ・・・ いろいろなデータを選んで送るため。
- 電池: コイン電池がいつています。 これがないとリモコンは動かない。
- 発振子: 規則的なデータパターンや搬送波をを作る。
>送信機の信号パターン
LEDの両端にかかっている電圧は、約1.2Vです。LEDの発光は、バースト状の発光パターンがモールス信号のような発光しています。
 |
| 赤外線LEDにオシロスコープのプローブを付けて測定 |
下記の写真は、先頭のガイドパスルのバースト部分の拡大図です。
>送信信号の特徴
まず、約9ミリ秒のガイドパスル(HEADERと呼びましょう)が発光します。その後に、1ミリ秒の短いパルスと2ミリ秒の長めのパスルの組合せが、32回発光します。先頭の16個は変化しませんが、後半の16個が押すボタンによって変化します。
- HEADER: 9ms の バースト(Burst) 信号
- 「今からデータを送る」 お知らせをしている。
- これで、受信側に準備をやってもらう。
- DATA:
- 2つのパターンがある。 ・・・・ bit 「1」と「0」 の場合
■ 受信機の概要
>受信機は、Arduino Pro Mini と 赤外線受信モジュールの簡単な構成です。
 |
| 受信機の写真 |
>受信機のプロック図
>受信機の信号
>Xの仕組み
>受信データのフォーマット(デジタル)
>外部割込み
(1)割込み
(例)
お昼ごはんを食べている時
電話が鳴ってそれを取る。
(2)リモコン受信の場合
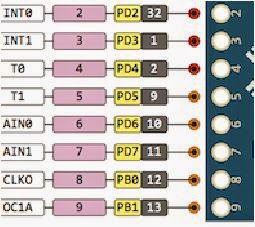
(3)Arduino Pro minni の割込みピン
(4)Arduino Pro miniの割込みプロクラム
/*
void attachInterrupt(1,myInt,CHANGE );
myInt(void){
........この関数を作る
}
*/
#define Input 3 #define LED 13 及び pinMode の説明
void myInt() の説明